
数智浪潮奔涌,仿真技术筑基。一季度收官之际,工程院深耕关键共性技术领域,硬件在环一体化仿真能力再获突破,为智能网联时代的汽车研发构筑起坚实、可信赖的创新基座!
硬件在环一体化仿真 × 智能驾驶可信仿真,打造电控系统仿真验证全流程服务能力
在智能汽车与新能源技术快速迭代的背景下,仿真验证已贯穿电控系统从需求设计、开发集成到量产验证的全生命周期,是保障产品功能、性能与安全性的关键技术手段。依托长期技术积累与实验室平台建设,工程院围绕硬件在环一体化仿真与多维验证、智能驾驶可信仿真两大核心业务方向,构建全流程、高精度、高可靠的仿真验证体系,面向智能驾驶、智能底盘、智能座舱、新能源动力等领域,提供专业化、工程化、一站式仿真开发与系统验证服务,以技术能力支撑行业高质量发展。
硬件在环一体化仿真与多维验证:从信号级到机械级,构建全层级仿真验证能力
硬件在环(HIL)仿真作为电控系统开发的重要工程手段,可在虚拟环境下完成控制器功能测试、策略验证及故障注入,有效缩短开发周期、降低实车测试风险与成本。经过多年深耕,工程院已形成覆盖智能驾驶、智能底盘、智能座舱、新能源动力四大领域的信号级硬件在环仿真能力体系。

图-整车HIL实验室
面向智能驾驶域,支持感知、决策、规划与控制全链路信号级仿真,可开展多场景工况下的算法验证与预期功能安全测试;在智能底盘域,实现转向、制动、悬架等系统的功能逻辑验证与功能安全测试;针对智能座舱域,可完成多屏交互、车载通信及座舱域控制器功能可靠性测试;面向新能源动力系统,搭建电池、电机、电控一体化仿真平台,支撑整车控制、动力响应及能量管理策略开发与验证。信号级 HIL 能力的全面布局,为各类电控系统前期开发与快速迭代提供了稳定可靠的技术基础。
以硬件在环一体化仿真为支撑,工程院构建“功能–性能–安全”多维一体化仿真验证体系,实现对电控系统的多维度考核。
功能维度:验证系统逻辑完整性、工况覆盖度与场景适应性;
性能维度:测试系统响应速度、控制精度、动态特性等关键指标;
安全维度:开展故障注入、极限环境、边缘工况等安全性验证,保障系统在复杂条件下稳定运行。
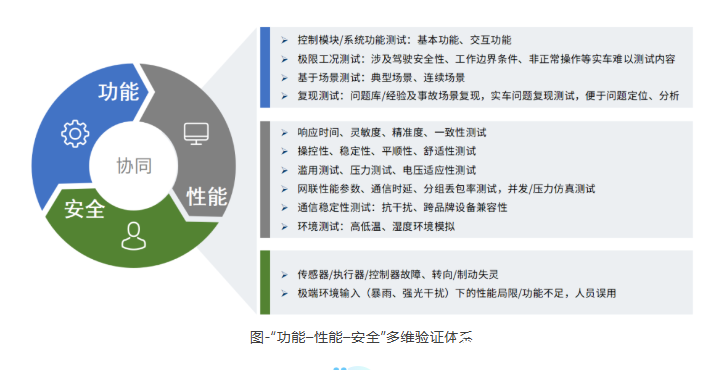
图-“功能–性能–安全”多维验证体系
智能驾驶可信仿真:高保真建模与精度对标,提升虚拟测试工程可信度
智能驾驶系统的规模化应用,依赖海量、高效、高可信度的仿真测试支撑。传统仿真受建模精度、场景真实性等因素影响,测试结果与实车存在偏差,难以满足高阶智能驾驶验证要求。工程院围绕智能驾驶可信仿真开展技术建设,以高保真建模 + 多维度精度对标为核心,提升虚拟测试的真实性、一致性与工程可用性。
在高保真建模方面,重点实现三大维度精细化建模:一是车辆动力学高保真建模,精准复现加速、制动、转向等动态特性,覆盖不同载荷、路面附着、车速条件下的车辆响应,保证虚拟车辆运动特性与实车高度一致;二是传感器高保真建模,针对摄像头、毫米波雷达、激光雷达等主流传感器,构建包含噪声、畸变、遮挡、雨雾天气等真实干扰特性的模型,还原实际感知输出,提升感知算法验证的有效性;三是复杂环境与场景建模,构建覆盖城市道路、高速公路、乡村道路及典型极端天气的场景库,包含行人、非机动车、交通参与者及动态交通流,实现复杂场景与边缘工况的真实还原。
在此基础上,工程院建立系统化精度对标机制,通过实车测试数据与仿真结果双向比对、迭代校准,持续优化模型参数,保证仿真精度满足工程应用要求。从传感器信号输出、车辆动力学响应,到环境交互逻辑,与实车的高一致性,有效改善行业普遍存在的仿真可信度不足问题。
基于可信仿真能力,可高效开展大规模场景自动化测试、极端边缘场景覆盖验证及算法迭代优化,显著减少实车测试里程与验证成本,加快智能驾驶系统开发与商业化落地进程。
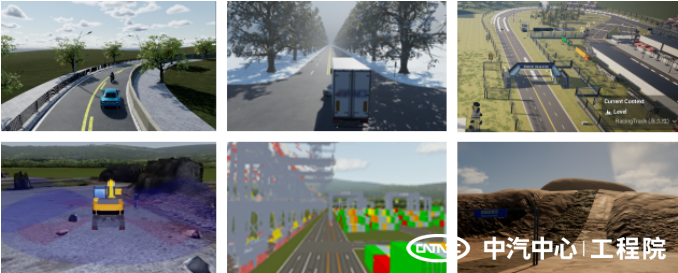
图-仿真应用场景
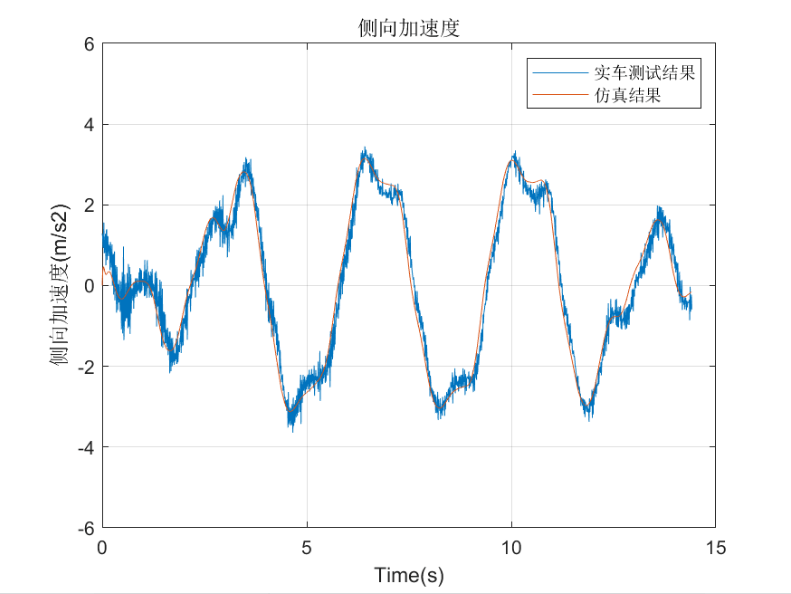
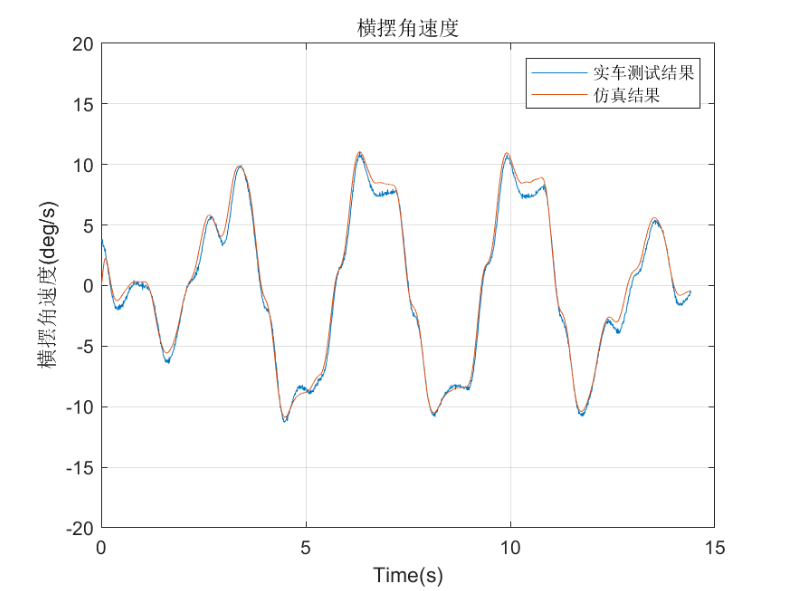
图-仿真与实车车辆动态数据对比
未来,工程院将继续深化仿真验证技术研究,面向智能驾驶、线控底盘、新能源动力、低空经济、具身智能等新兴领域,构建更完整、更高效、更可靠的仿真验证解决方案,助力行业伙伴攻克关键技术问题、加速产品迭代升级,共同推动智能汽车产业向智能化、电动化、安全化方向持续发展。